Niklas Funk
Robotics Research Scientist
Amazon Robotics
About Me
I am Niklas, a Robot Learning Research Scientist dedicated to advancing robotic manipulation capabilities in the wild, working towards a future where robots seamlessly perform and assist with meaningful, real-world tasks.
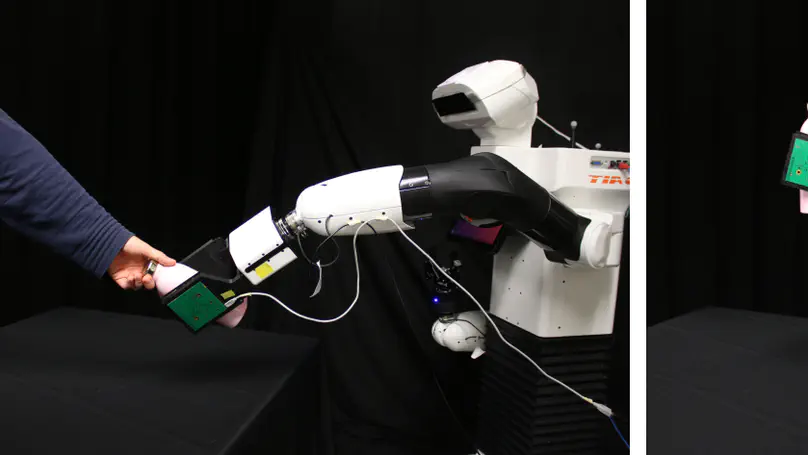
To achieve this, I focus on developing sensors, representations, and algorithms that enable and advance robotic manipulation. Beyond more abstract investigations, I have also invested substantial time in deploying, testing, and validating these advancements on several physical robotic platforms. Alongside my academic research, I have gained valuable industry experience through research internships at NVIDIA, the Toyota Research Institute (TRI), and Bosch.
As part of this journey, I completed my PhD with summa cum laude at the Intelligent Autonomous Systems Group at TU Darmstadt, under the supervision of Prof. Jan Peters. My dissertation, titled “Learning Robotic Manipulation through Vision, Touch, and Spatially Grounded Representations,” focused on exploiting the intersection between robotics and machine learning to advance robotic manipulation capabilities.
- Robotics
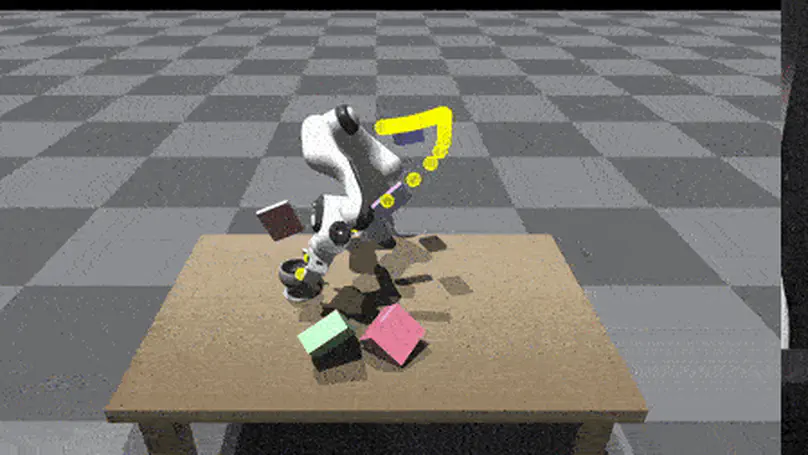
- Dexterous Manipulation
- Imitation / Reinforcement Learning
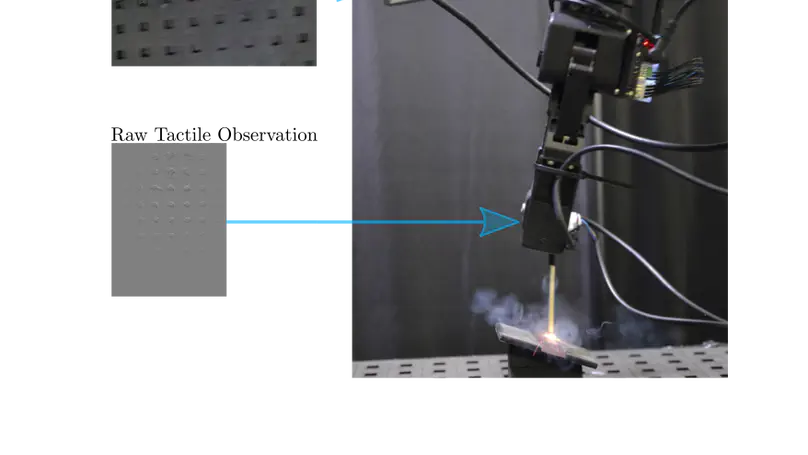
- Tactile Sensing
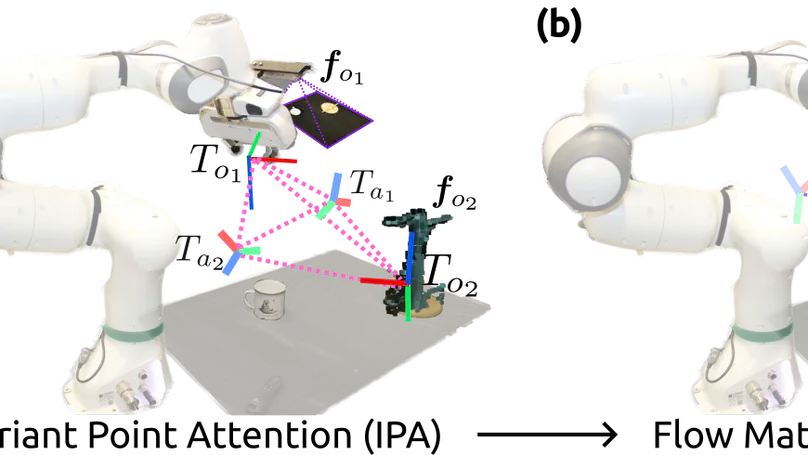
- Graph-based Representations
-
BSc in Electrical Engineering and Information Technology, 2017
ETH Zurich
-
MSc in Robotics, Systems & Control, 2020
ETH Zurich
-
PhD in Computer Science, 2025
TU Darmstadt