Placing by Touching: An empirical study on the importance of tactile sensing for precise object placing
Abstract
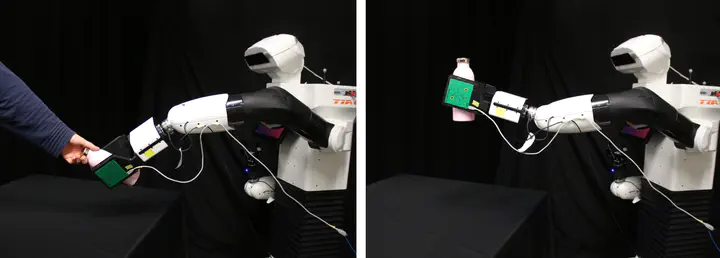
This work deals with a practical everyday problem - stable object placement on flat surfaces starting from unknown initial poses. Common object-placing approaches require either complete scene specifications or extrinsic sensor measurements, e.g., cameras, that occasionally suffer from occlusions. We propose a novel approach for stable object placing that combines tactile feedback and proprioceptive sensing. We devise a neural architecture that estimates a rotation matrix, resulting in a corrective gripper movement that aligns the object with the placing surface for the subsequent object manipulation. We compare models with different sensing modalities, such as force-torque, an external motion capture system, and two classical baseline models in real-world object placing tasks with different objects. The experimental evaluation of our placing policies with a set of unseen everyday objects reveals significant generalization of our proposed pipeline, suggesting that tactile sensing plays a vital role in the intrinsic understanding of robotic dexterous object manipulation.
Niklas Funk
Robotics Research Scientist
My research interests include robotics, reinforcement learning and dexterous manipulation.