High-Resolution Pixelwise Contact Area and Normal Force Estimation for the GelSight Mini Visuotactile Sensor Using Neural Networks
Abstract
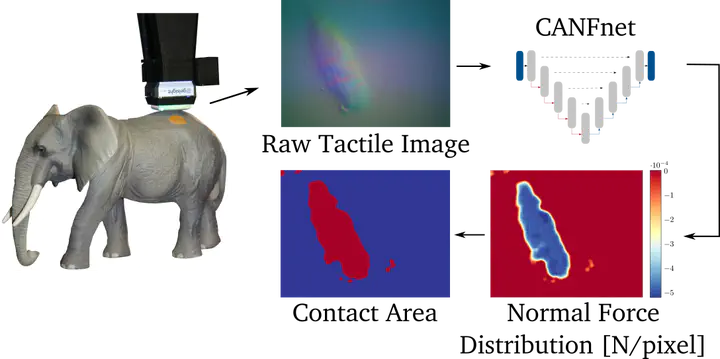
Visuotactile sensors are gaining momentum in robotics because they provide high-resolution contact measurements at a fraction of the price of conventional force/torque sensors. It is, however, not straightforward to extract useful signals from their raw camera stream, which captures the deformation of an elastic surface upon contact. To utilize visuotactile sensors more effectively, powerful approaches are required, capable of extracting meaningful contact-related representations. This paper proposes a neural network architecture called CANFnet that provides a high-resolution pixelwise estimation of the contact area and normal force given the raw sensor images. The CANFnet is trained on a labeled experimental dataset collected using a conventional force/torque sensor, thereby circumventing material identification and complex modeling for label generation. We test CANFnet using GelSight Mini sensors and showcase its performance on real-time force control and marble rolling tasks. We are also able to report generalization of the CANFnets across different sensors of the same type. Thus, the trained CANFnet provides a plug-and-play solution for pixelwise contact area and normal force estimation for visuotactile sensors. The models, dataset, and additional information are open-source at our website.

Niklas Funk
Robotics Research Scientist
My research interests include robotics, reinforcement learning and dexterous manipulation.