On the Importance of Tactile Sensing for Imitation Learning: A Case Study on Robotic Match Lighting
Abstract
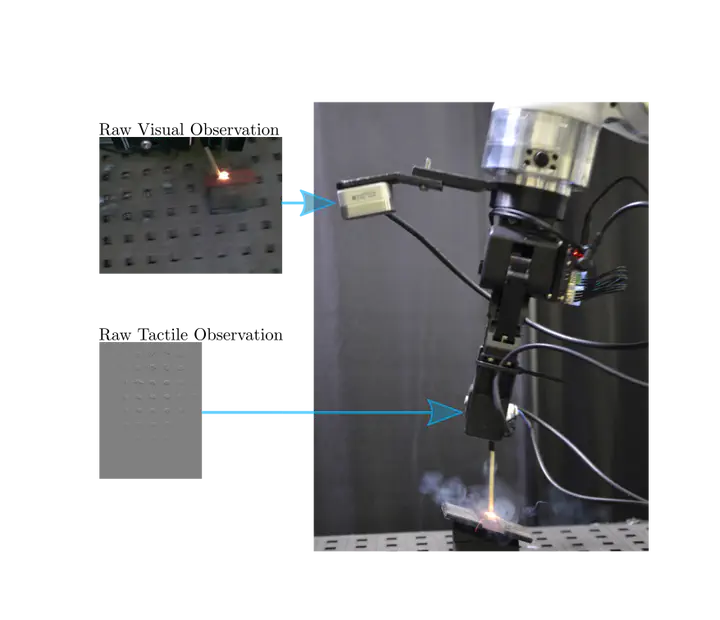
The field of robotic manipulation has advanced significantly in the last years. At the sensing level, several novel tactile sensors have been developed, capable of providing accurate contact information. On a methodological level, learning from demonstrations has proven an efficient paradigm to obtain performant robotic manipulation policies. The combination of both holds the promise to extract crucial contact-related information from the demonstration data and actively exploit it during policy rollouts. However, despite its potential, it remains an underexplored direction. This work therefore proposes a multimodal, visuotactile imitation learning framework capable of efficiently learning fast and dexterous manipulation policies. We evaluate our framework on the dynamic, contact-rich task of robotic match lighting - a task in which tactile feedback influences human manipulation performance. The experimental results show that adding tactile information into the policies significantly improves performance by over 40%, thereby underlining the importance of tactile sensing for contact-rich manipulation tasks.
Niklas Funk
PhD Student in Computer Science
My research interests include robotics, reinforcement learning and dexterous manipulation.