Abstract
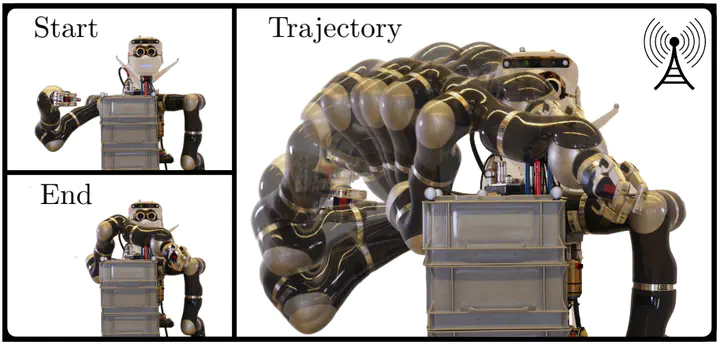
We present a framework for model-free learning of event-triggered control strategies. Event-triggered methods aim to achieve high control performance while only closing the feedback loop when needed. This enables resource savings, e.g., network bandwidth if control commands are sent via communication networks, as in networked control systems. Event-triggered controllers consist of a communication policy, determining when to communicate, and a control policy, deciding what to communicate. It is essential to jointly optimize the two policies since individual optimization does not necessarily yield the overall optimal solution. To address this need for joint optimization, we propose a novel algorithm based on hierarchical reinforcement learning. The resulting algorithm is shown to accomplish high-performance control in line with resource savings and scales seamlessly to nonlinear and high-dimensional systems. The method’s applicability to real-world scenarios is demonstrated through experiments on a six degrees of freedom real-time controlled manipulator. Further, we propose an approach towards evaluating the stability of the learned neural network policies.
Niklas Funk
Robotics Research Scientist
My research interests include robotics, reinforcement learning and dexterous manipulation.